要闻速览
惠农政策
各地动态
农业科技
市场动态
展会信息
专题策划
乡村振兴
聚焦杨凌
农资· 农机
农科视频
品牌农业
创业致富
现代果业
知名农企
农品安全
经营主体
文旅农创
贮藏加工
种植· 养殖
互联网新闻信息许可证:61120180013

智能推翻草机器人有效提高牧场饲养牛只的智能化水平
2024-12-25 18:37:47
记者近日获悉,西北农林科技大学动物科学学院胡建宏教授科研团队联合机电学院宋怀波教授科研团队针对牛只进食过程中出现的抵料现象,开发了一种基于激光SLAM的牧场智能推翻草机器人。该机器人实现了对牧场环境的精准建图、自主导航、高效推翻草等任务,有效提高了牧场饲养牛只的智能化水平。
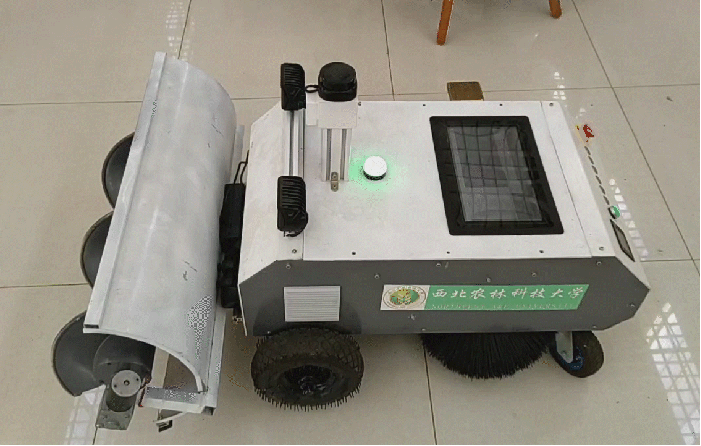
智能推翻草机器人
“牛只抵料现象会导致饲料被推向远离围栏的位置,使得牛只无法正常进食,造成饲料浪费及牛只摄食不足。该装置充分解决了这项饲喂难题,它能够自主导航并自行切换工作模式,将远离围栏位置的饲料进行翻混后推送至饲料槽中。”胡建宏教授介绍说。

智能推翻草机器人场景作业
据悉,该智能推翻草机器人已经经历了两次迭代升级。相比于初代机器人,最新一代的智能推翻草机器人拥有这更加突出的工作性能。在底盘设计方面,通过改进底盘结构,优化PID控制算法,增强了推翻草作业任务的稳定性;在智能导航方面,采用加载里程计信息的Cartographer算法,提高了牧场环境地图构建精度;在人机交互方面,开发手机端应用软件,实现机器人作业状态的远程监控。此外,团队开发设计了双电源供电模块和工作状态自动切换算法,有效提升机器人的作业时长。
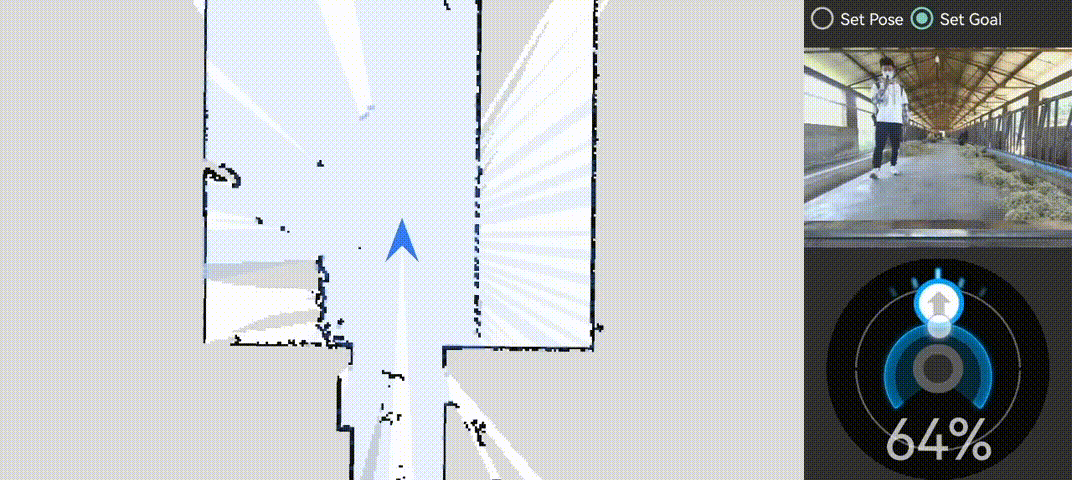
手机端控制实例
该科研团队多年来致力于结合人工智能技术开展智慧畜牧研究,在大型动物智慧饲养方面积累了表为丰富的研究经验。团队近三年来在Top期刊上先后发表文章20余篇,提出的设备、方法与技术已在宁夏、陕西等多地进行了实地部署与示范应用,聚焦助力智慧养殖技术的发展。
农业科技报-中国农科新闻网记者 胡润田 实习记者 张荣
 返回顶部
返回顶部陕ICP备13005735号-1 农业科技报社版权所有 联系电话:029-87031703 www.nkb.com.cn